


In the classic cartoon “The Jetsons,” Rosie the robotic maid seamlessly switches from vacuuming the house to cooking dinner to taking out the trash. But in real life, training a general-purpose robot remains a major challenge.
Typically, engineers collect data that are specific to a certain robot and task, which they use to train the robot in a controlled environment. However, gathering these data is costly and time-consuming, and the robot will likely struggle to adapt to environments or tasks it hasn’t seen before.
To train better general-purpose robots, MIT researchers developed a versatile technique that combines a huge amount of heterogeneous data from many of sources into one system that can teach any robot a wide range of tasks.
Their method involves aligning data from varied domains, like simulations and real robots, and multiple modalities, including vision sensors and robotic arm position encoders, into a shared “language” that a generative AI model can process.
By combining such an enormous amount of data, this approach can be used to train a robot to perform a variety of tasks without the need to start training it from scratch each time.
This method could be faster and less expensive than traditional techniques because it requires far fewer task-specific data. In addition, it outperformed training from scratch by more than 20 percent in simulation and real-world experiments.
“In robotics, people often claim that we don’t have enough training data. But in my view, another big problem is that the data come from so many different domains, modalities, and robot hardware. Our work shows how you’d be able to train a robot with all of them put together,” says Lirui Wang, an electrical engineering and computer science (EECS) graduate student and lead author of a paper on this technique.
Wang’s co-authors include fellow EECS graduate student Jialiang Zhao; Xinlei Chen, a research scientist at Meta; and senior author Kaiming He, an associate professor in EECS and a member of the Computer Science and Artificial Intelligence Laboratory (CSAIL). The research will be presented at the Conference on Neural Information Processing Systems.
Inspired by LLMs
A robotic “policy” takes in sensor observations, like camera images or proprioceptive measurements that track the speed and position a robotic arm, and then tells a robot how and where to move.
Policies are typically trained using imitation learning, meaning a human demonstrates actions or teleoperates a robot to generate data, which are fed into an AI model that learns the policy. Because this method uses a small amount of task-specific data, robots often fail when their environment or task changes.
To develop a better approach, Wang and his collaborators drew inspiration from large language models like GPT-4.
These models are pretrained using an enormous amount of diverse language data and then fine-tuned by feeding them a small amount of task-specific data. Pretraining on so much data helps the models adapt to perform well on a variety of tasks.
“In the language domain, the data are all just sentences. In robotics, given all the heterogeneity in the data, if you want to pretrain in a similar manner, we need a different architecture,” he says.
Robotic data take many forms, from camera images to language instructions to depth maps. At the same time, each robot is mechanically unique, with a different number and orientation of arms, grippers, and sensors. Plus, the environments where data are collected vary widely.
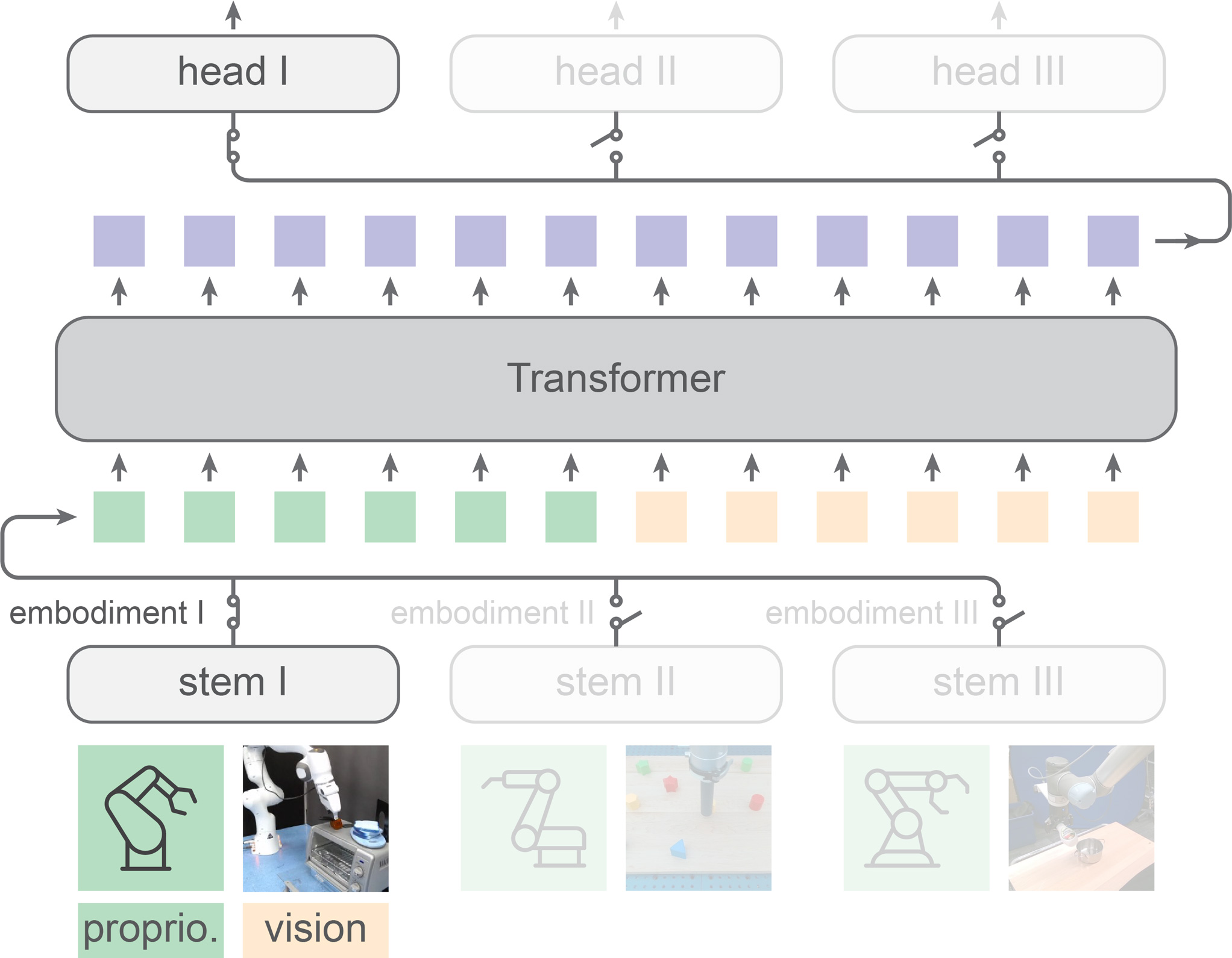
The MIT researchers developed a new architecture called Heterogeneous Pretrained Transformers (HPT) that unifies data from these varied modalities and domains.
They put a machine-learning model known as a transformer into the middle of their architecture, which processes vision and proprioception inputs. A transformer is the same type of model that forms the backbone of large language models.
The researchers align data from vision and proprioception into the same type of input, called a token, which the transformer can process. Each input is represented with the same fixed number of tokens.
Then the transformer maps all inputs into one shared space, growing into a huge, pretrained model as it processes and learns from more data. The larger the transformer becomes, the better it will perform.
A user only needs to feed HPT a small amount of data on their robot’s design, setup, and the task they want it to perform. Then HPT transfers the knowledge the transformer grained during pretraining to learn the new task.
Enabling dexterous motions
One of the biggest challenges of developing HPT was building the massive dataset to pretrain the transformer, which included 52 datasets with more than 200,000 robot trajectories in four categories, including human demo videos and simulation.
The researchers also needed to develop an efficient way to turn raw proprioception signals from an array of sensors into data the transformer could handle.
“Proprioception is key to enable a lot of dexterous motions. Because the number of tokens is in our architecture always the same, we place the same importance on proprioception and vision,” Wang explains.
When they tested HPT, it improved robot performance by more than 20 percent on simulation and real-world tasks, compared with training from scratch each time. Even when the task was very different from the pretraining data, HPT still improved performance.
“This paper provides a novel approach to training a single policy across multiple robot embodiments. This enables training across diverse datasets, enabling robot learning methods to significantly scale up the size of datasets that they can train on. It also allows the model to quickly adapt to new robot embodiments, which is important as new robot designs are continuously being produced,” says David Held, associate professor at the Carnegie Mellon University Robotics Institute, who was not involved with this work.
In the future, the researchers want to study how data diversity could boost the performance of HPT. They also want to enhance HPT so it can process unlabeled data like GPT-4 and other large language models.
“Our dream is to have a universal robot brain that you could download and use for your robot without any training at all. While we are just in the early stages, we are going to keep pushing hard and hope scaling leads to a breakthrough in robotic policies, like it did with large language models,” he says.
This work was funded, in part, by the Amazon Greater Boston Tech Initiative and the Toyota Research Institute.








